영국 연구팀, 씹는 과정 모방 간 측정 로봇 연구결과 발표
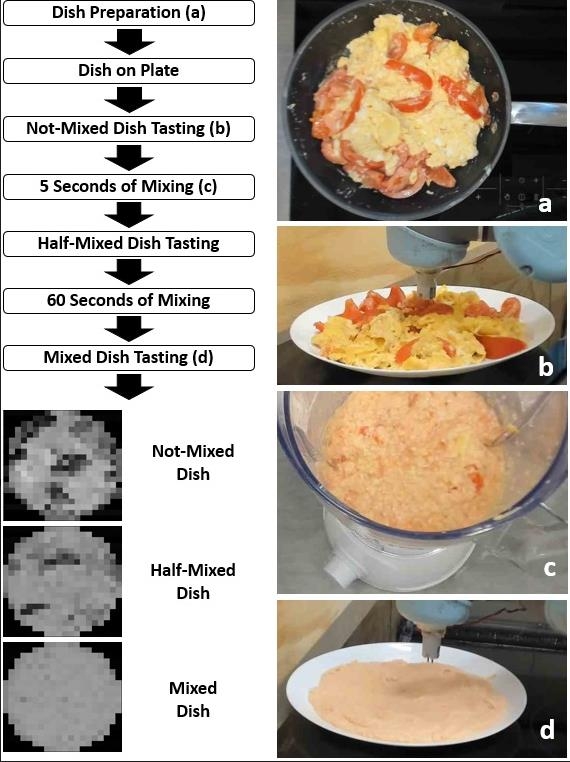
토마토를 곁들인 스크램블드에그(a)를 믹서기를 이용해(c) 인간이 씹는 과정을 모방했다. d는 믹서기를 이용해 완전히 간 음식을 로봇셰프의 팔 끝에 달린 전도도 탐지기로 측정하는 장면이다. [Bio-Inspired Robotics Laboratory, University of Cambridge 제공
입맛은 같은 음식을 놓고도 사람마다 다르게 느낄 수 있는 까다로운 영역이지만 로봇 셰프가 개인의 입맛에 맞춰 음식을 만들어 내놓는 시대가 아주 먼 미래의 얘기는 아닌 듯하다.
로봇 셰프가 시식자의 반응을 토대로 먹을 만한 ‘오믈렛’을 만드는 시험을 통과한 데 이어 ‘전자 혀'(electronic tongue)를 넘어 인간의 실제 입맛을 모방하기 위해 음식물을 씹는 과정에서 간의 변화를 측정하는 단계까지 진화했다.
영국 케임브리지대학에 따르면 이 대학 공학 교수 푸미야 리다 박사가 이끄는 연구팀은 유럽 가전업체 베코(Beko)와 공동으로 음식물을 씹는 단계에서 간의 변화를 측정한 로봇 셰프를 연구한 결과를 ‘로봇 및 인공지능학 프런티어스'(Frontiers in Robotics & AI)에 발표했다.
특히 음식물을 씹을 때 침과 소화 효소가 더해지고 재료가 섞이면서 식감과 맛도 변화하는데, 혀에 있는 미각을 통해 두뇌에 지속해서 전달됨으로써 음식의 풍미를 판단하게 된다.




인간은 수백만 년간 해온 일이라 자동반사적으로 진행되지만 로봇 셰프에게는 이 과정이 여간 어려운 일이 아니다.
‘바이오 로봇 실험실’을 이끌며 인간에게는 쉽지만 로봇은 수행하기 어려운 문제들을 연구해온 리다 교수는 오믈렛을 조리할 수 있는 로봇 셰프를 시연한 데 이어 씹는 과정에서 두뇌가 계속 맛의 변화를 느끼는 과정을 모방한 연구를 진행했다.
토마토를 곁들인 스크램블드에그를 만든 뒤 믹서를 이용해 씹는 과정을 모방하고 3단계에 걸쳐 간을 측정했다. 로봇 셰프의 팔 끝에 전도도(conductance) 탐지 장치를 부착해 염도 센서로 활용했다.
논문 제1저자인 로봇학 박사과정 대학원생 그르제고르즈 소차키는 “조리하는 데 로봇을 활용하려면 맛을 볼 줄 아는 것이 중요하다”면서 “이를 위해서는 주방에서 사용할 수 있을 정도로 값싸고, 로봇 셰프에 부착할 만큼 작고, 조리 과정에서 재빨리 파악할 정도로 빠른 무언가가 필요하다”고 했다.
로봇 셰프는 전도도 탐지 장치를 이용해 수 초 만에 간을 측정한 것으로 발표됐다.
연구팀은 로봇 셰프의 간 측정이 시간이 오래 걸리고 균질화된 시료를 일회성으로 측정해온 전자 혀를 비롯한 기존 맛 측정 방식보다 훨씬 더 정확한 결과를 산출한 것으로 제시했다.
연구팀은 이번에 연구된 기술이 아직 개념증명 단계이지만 인간이 음식물을 씹고 맛보는 과정을 모방함으로써 로봇 셰프가 궁극에는 개인 입맛에 맞춰 즐길 수 있는 음식을 내놓게 될 것이라고 했다.